您好,欢迎访问常州艾迪生电机技术有限公司官方网站!



全国咨询热线:13809072673
公司:常州艾迪生电机技术有限公司
地址:江苏常州湖塘镇马杭街道凌道工业园东昇路12号
微信:
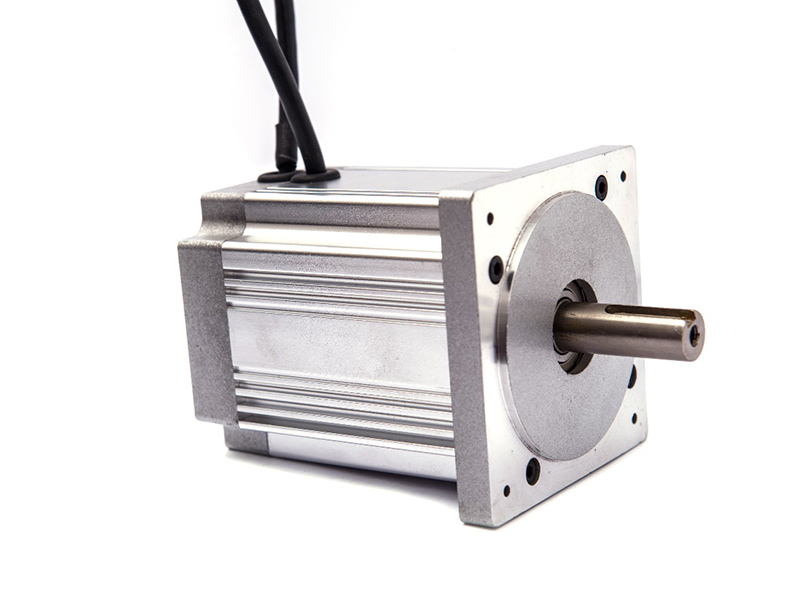
电机在协作机器人(又称为协同机器人或合作机器人)中发挥着重要的作用。协作机器人是一种能够与人类工作者安全地协同工作的机器人系统。以下是电机在协作机器人中的一些常见应用:
1、关节驱动:协作机器人通常由多个关节构成,电机被用于驱动每个关节,使机器人能够实现灵活的运动。这些电机通过精确的位置和速度控制,实现机器人的准确姿态和运动能力。
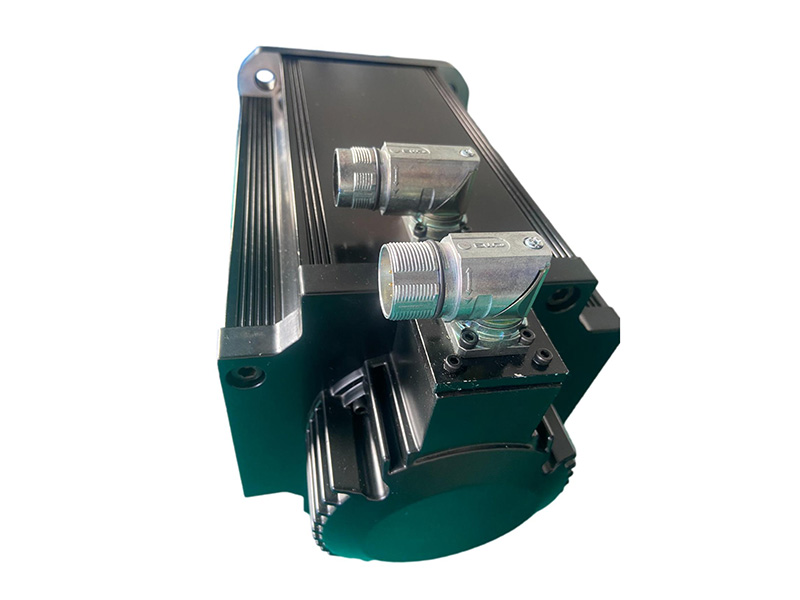
2、执行器控制:电机作为执行器,用于驱动协作机器人的末端执行器(例如夹爪、吸盘等)。电机的精确控制能够使机器人在与人类进行协作时完成精细的操作,例如抓取、放置和装配物体。
3、动力传输:电机通过驱动传动系统(如齿轮、皮带或螺旋桨)来传输动力。这些传动系统将电机的旋转运动转换为机器人所需的线性或旋转运动,以完成各种任务。
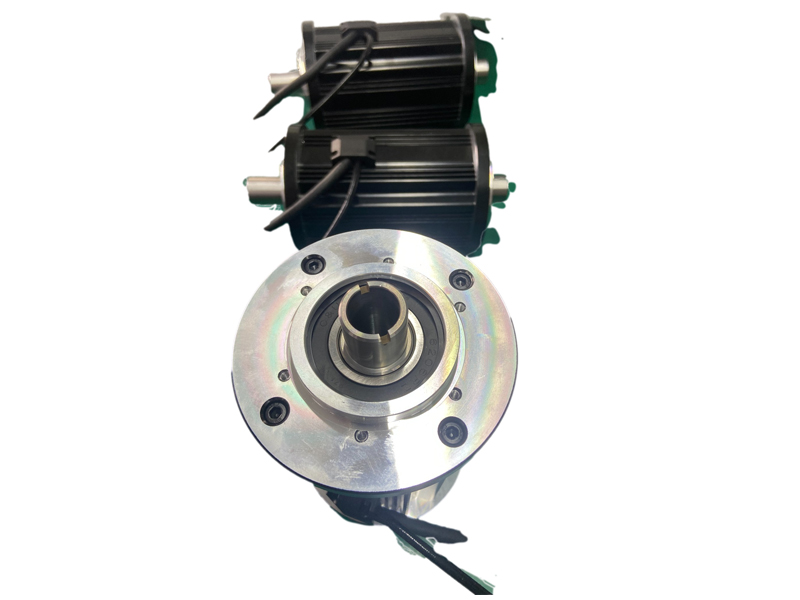
4、动态平衡和安全:协作机器人需要在与人类共享工作空间时保持稳定和安全。电机被用于实现机器人的动态平衡和姿态调整,以应对外部干扰并确保机器人操作的稳定性和安全性。
5、反馈控制:电机通常与传感器(如编码器)配合使用,提供对机器人位置、速度和力的准确反馈。这种反馈信息可用于实现精确的控制和协调机器人与人类工作者的动作。
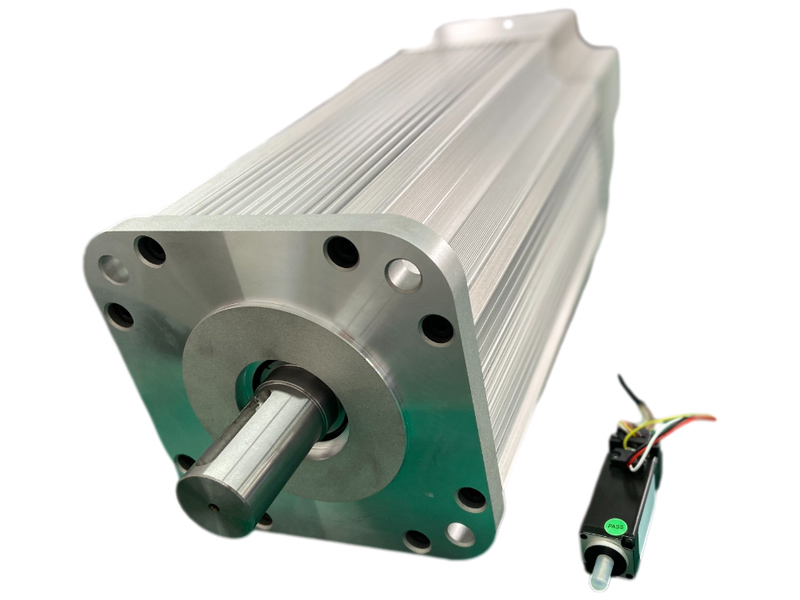
通过这些应用,电机在协作机器人中为实现精准、安全、协调的合作工作提供了动力和控制支持,使得协作机器人能够更好地适应和与人类工作者共同工作。


为您展示全新的行业资讯。
伺服电机是一种闭环控制系统,其工作原理基于位置、速度或转矩的反馈控制。基本的伺服电机系统通常由三个主...
AGV(自动导引车)通常使用直流无刷电机(BLDC)或直流伺服电机作为其驱动电机。这两种电机类型在AGV应用中...
PLC(可编程逻辑控制器)可以通过不同的方式控制伺服电机。以下是一种常见的方法:1、硬件接线:将PLC的数字...
直流伺服电机具有以下几个主要特点:1、高精度控制:直流伺服电机通过闭环反馈控制系统,能够实现精确的位置...